
YUCO-Carrier micro-AUV is the ideal tool to embed your sensors or even your autonomous sondes!
YUCO-Carrier is provide with all the necessary functions to be ready-to-deploy :
- INX Navigation system
- SEAPLAN Software
- Embedded rechargeable batteries
- SEACOMM
- Field case and accessories
- DVL (in option)
The unique wet payload capability allow to flexibly implement any type of waterproof sonde or sensor.
YUCO micro-AUV payload capacity:
- Up to ~ 2kg
- > 45cm length
- Autonomous or powered by YUCO-Carrier
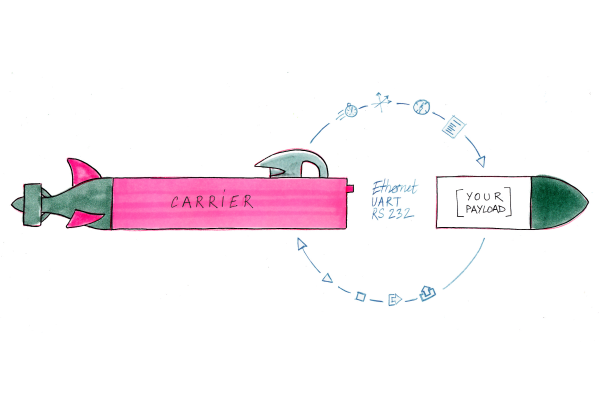
YUCO-Carrier is equipped with Subconn connectors and can provide power and serial data-communication. If provided with .step files SEABER element to be integrated to fit in the YUCO underwater vehicle.
With the payload YUCO-Carrier micro-AUV as an autonomy up to 10 hours.
YUCO-Carrier underwater vehicle is ideally fitter for costal monitoring or lake monitoring that require to go often at site even for single person deployments.
What changes all in YUCO-Carrier, is that it is now possible to consider to carry a fully autonomous system on small and cost effective AUV. Make YUCO-Carrier micro-AUV the “taxi-driver” of the payload of your choice.
YUCO-CARRIER is also available with the Extended Ethernet API option to communicate with high level device. It can stream its state to the payload, like its position, attitude, speed, status, etc. and the payload can send requests to the YUCO-CARRIER, like start/stop, mission steps, payload data etc.
The API is provided with a sample code and a YUCO API simulator to help developing customer applications.




Lenght: 98cm
Diameter: 12cm
Weight in air: 8kg
Depth rating: 300m
Speed: 2 to 6 knots
Endurance: 10 hours at 2,5 knots
- Power Supply: 12 to 48 V
- Communication: RS232, USB, Ethernet
- Payload diameter : up to ~4inch
- Payload length: up to 45cm
- End Nose design – on request
YUCO offers the possibility to integrate a DVL for a more accurate navigation.
For complementary payload options please contact us.
You can also configure you YUCO on the pricing section.
YUCO-Carrier is capable of a very wide type of application depending on the sensor you will embed. See our example of uses cases with our existing AUV range to get an idea.